One of my friends (Vincent Groenhuis) has obtained a PhD for research on medical robots that can position a biopsy needle.
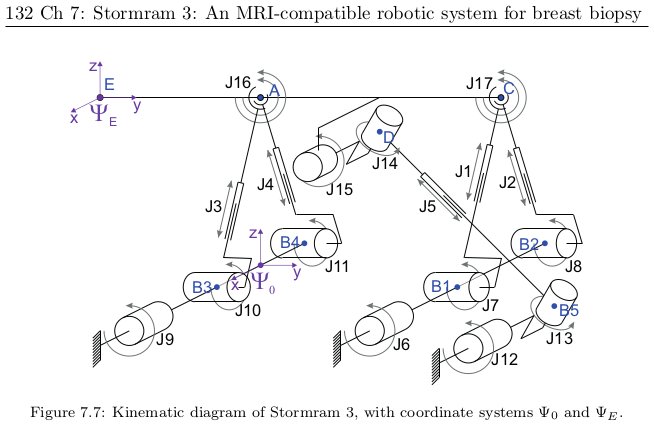
In one of the models, called “Stormram 1”, the position of the needle E depends on the positions of 5 pistons, stemming from points B_1 till B_5.
I took up the challenge to work this calculation out, and test its convergence. That could save the purchase of a Matlab licence!
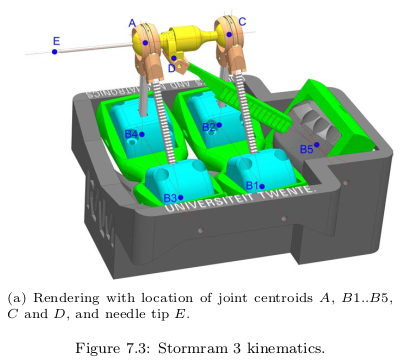
(The 2 pictures on this page were taken from Vincent Groenhuis’s PhD thesis. I thank the author for his permission. The full text can be found in Robotic systems for breast biopsy
using MRI and ultrasound imaging ISBN: 978-90-365-4892-2 )